
Merhabalar! Bugün SAMM Blog’da bir çok projesini bulabileceğiniz Micro:bit geliştirme kartı ile bir proje yapacağız. Micro:bit dahili Bluetooth modülü, buton, ivmeölçer ve dot matrix’i ile robotik eğitiminde kesinlikle en iyi Arduino alternatiflerinden. Giriş seviyesinde bir eğitimi tek bir direnç bile almadan tamamlayabiliyorsunuz. Ancak bugün biz birlikte biraz ileri seviye bir proje yapacağız 😊 Projemiz Eldiven Kontrollü Bluetooth Araba! Bilim kurgu filmlerinden fırlayıp gelmiş gibi olan bu projede hem bir Micro:bit araba yapacağız hem de iki Micro:bit’i haberleştirmeyi ve kontrol etmeyi öğreneceğiz. Haydi Elle Kumanda Edilen Micro:bit Araba projemize başlayalım!
Micro:bit Araba Malzemeleri
- 2 x Micro:bit
- 2 x Micro:bit Genişletme Modülü
- 2 x orta boy breadboard
- 2 x Flex Sensör
- 2 x DC motor
- 1 x L293D motor sürücü
- 4 x 10K direnç
- Yeterince jumper kablo
- 1 x 9V Pil ve yuvası
- 1 x Micro:bit için pil yatağı ve piller
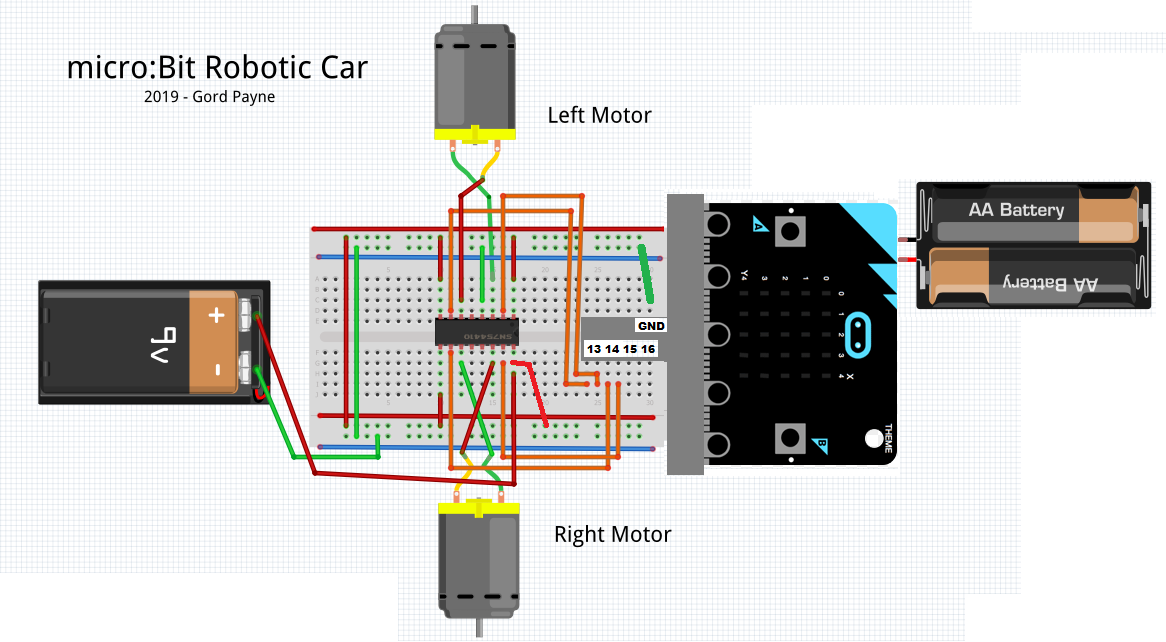
Adım 1: Elle Kumanda Edilen Micro:bit Araba Devresi
Arabamızın devresini kurmak için 1 x breadboard, 2 x DC motor, 1 x L293D sürücü, 1 x Micro:bit genişletme modülü, yeteri kadar jumper ve 9V pile ihtiyacımız var. VCC yazan yerleri 9V pilimizi taktığımız hatta bağlayacağız.
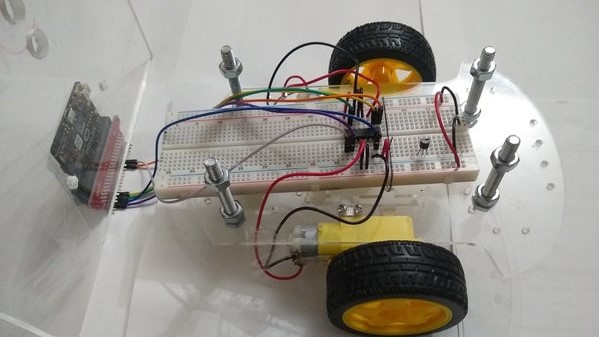
Kurduğumuz devreyi araba modelimize monte ederek hareket edebilecek hale getirelim.
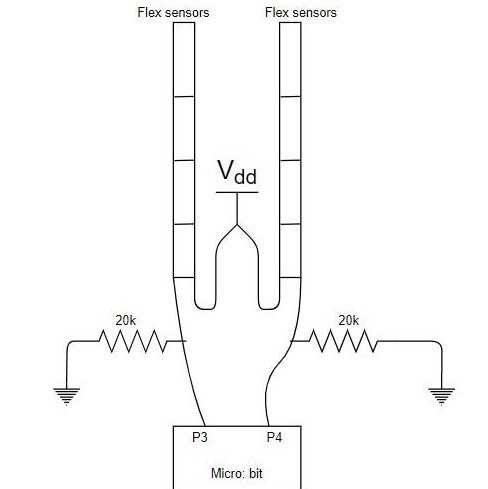
Adım 2: Eldiven Devresi
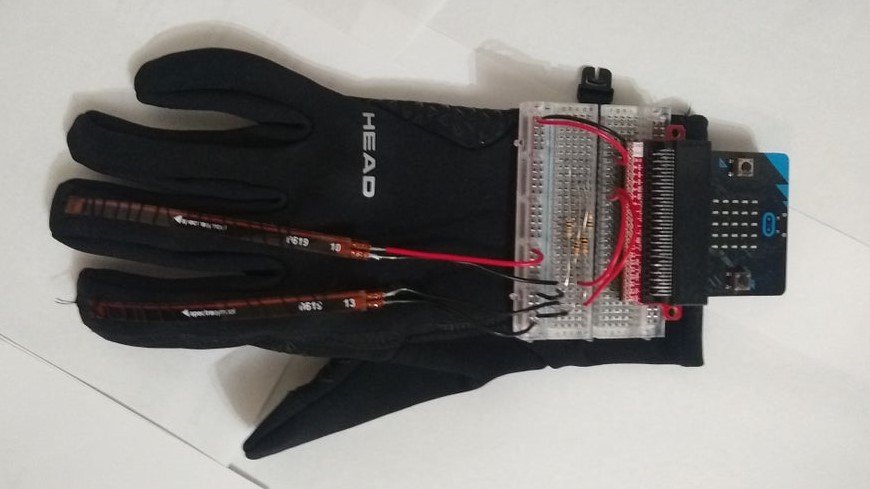
Öncelikle flex sensörlerimizi eldivenimize dikerek başlamalıyız. Dikişlerimizin ne çok sıkı ne çok seyrek olmaması gerek, arabamızı parmak hareketlerimizle kontrol edeceğimiz için hareketleri iyi algılaması çok önemli. Eldivenimizin devresini kurmak için 1 x mini breadbord, 1 x Micro:bit genişletme modülü, 4 x 10K direnç ve gerektiği kadar jumper kabloya ihtiyacımız var.

Eldivenimiz bittiği zaman aşağıdaki gibi görünecek. Breadboardımızı eldivenimize iyi sabitlemeliyiz çünkü dönüşler için Micro:bit kartımızın üzerindeki ivmeölçeri kullanacağız.
Devrelerimiz tamam, programımıza geçebiliriz.
Adım 3: Elle Kumanda Edilen Micro:bit Arabanın Programı
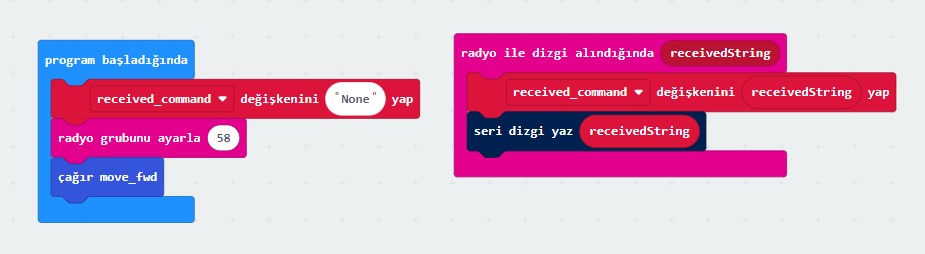
Eldiven Micro:bit Kartından Mesaj Alma:
recievedString zaten kumanda karttan alınan mesajı ifade eder. Burada “recievedCommand” adında bir değişken oluşturarak okuduğumuz değerleri buraya kaydediyoruz. Örneğin kumanda Micro:bit kartımızdan “Right” adında bir emir gelirse recievedCommand değişkenimizin değeri bu oluyor. Bu değeri ana algoritmada arabamızı kumanda etmek için kullanacağız.
set_ Fonksiyonları:
DC motorların yönleri kablolarından verilen akıma göre değişir. Set fonksiyonları ile yapılacak harekete göre pinlerden akım verilerek bunlar set ediliyor.
move, stop, stop_break Fonksiyonları:
Move hareketi sağlayan, stop durduran fonksiyon. Hızımızı değiştirmek için move fonksiyonundaki analog değeri değiştirebiliriz. Stop_break fonksiyonu ise farklı haber gelmeden önce motorları set fonksiyonuna hazırlıyor.
move_ fonksiyonları:
Hareketi sağlayan fonksiyonlardır. Önce pinlere verilen akım sıfırlanır, daha sonra motorlar set edilir ardından hareket komutu verilir.

Bu temel fonksiyonlarımızın görevlerini anladıktan sonra ana algoritmamızı inceleyelim. Algoritmamızın görevi gelen mesaja göre arabamızın hareketini belirlemek. Bu sebeple If-Else-Else If şartlı kontrol yapısını kullandığımız bir programımız var. Kumandadan gelen mesaja karşılık gelen şarta göre hareket fonksiyonumuzu çalıştırıyoruz. Örneğin “Forward” yani ileri git mesajı geldiğinde move_fwd fonksiyonunu çalıştırıyor. Şartı kontrol etmek için eşittir mantık bloğunun bir tarafına mesajı sakladığımız recievedCommand değişkeni diğer tarafında string olarak doğru değer var.
Adım 4: Eldiven Micro:bit’in Programı
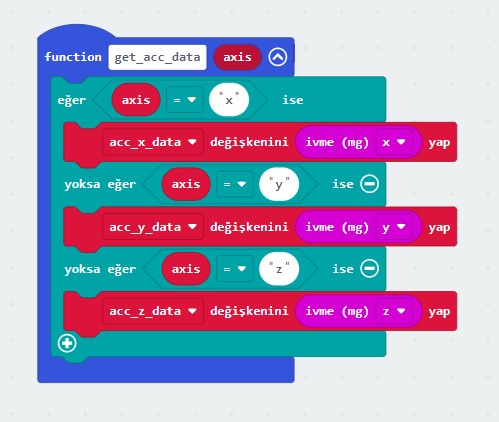
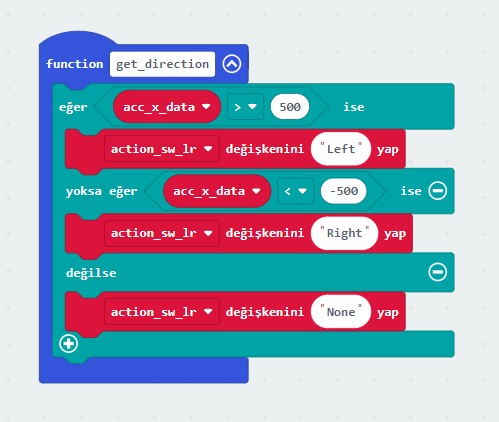
get_acc_ fonksiyonu ile ivmeölçerimizden aldığımız x,y, ve z değerlerini acc_ değişkenlerine kaydeder. get_direction fonksiyonu ile de bu değerleri sınayarak elimizin hangi yöne eğildiğini algılarız, sağa ve sola dönme hareketini buradan okuduğumuz veriye göre gerçekleştiririz.
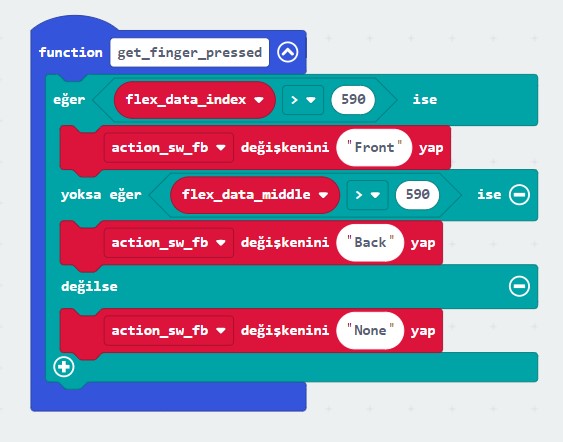
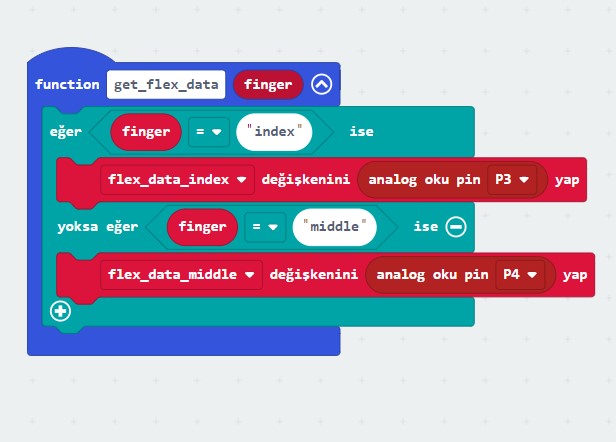
Get_flex_data fonksiyonu finger değişkeninden aldığı değere göre flex_data_index değişkeninin giriş pinini belirler. Bu iki parmağımızla kontrol yaptığımız için sırayla verileri okumamız için kullandığımız bir yöntemdir. “index” ve “middle” parmaklarımızın takma adları 😊
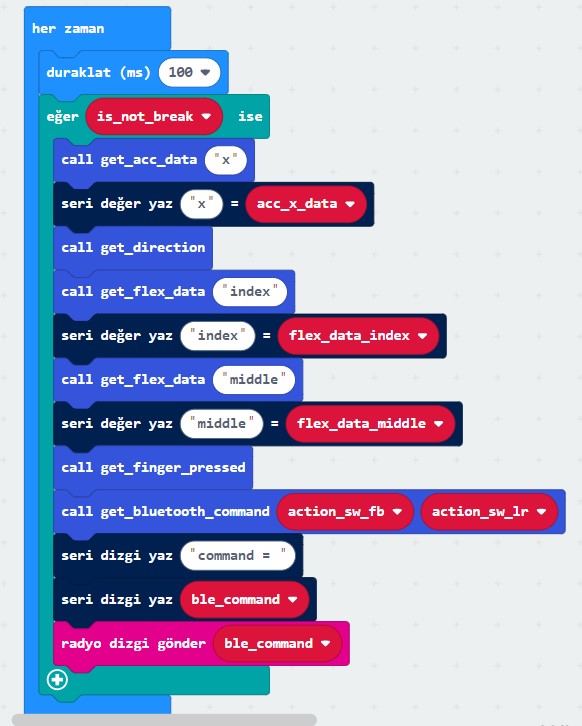
Son olarak hem flex sensörlerden hem de ivmeölçerimizden okuduğumuz değerleri kombine ettiğimiz ve arabamızın hareket komutunu belirlediğimiz fonksiyonumuzu inceleyelim. Okuduğumuz değerlere göre “ble_command” değişkenimize gerçek yön değerimizi yazarız. Bu değer bluetooth ile arabaya gönderdiğimiz string değerleri olacak, hatırlarsınız.
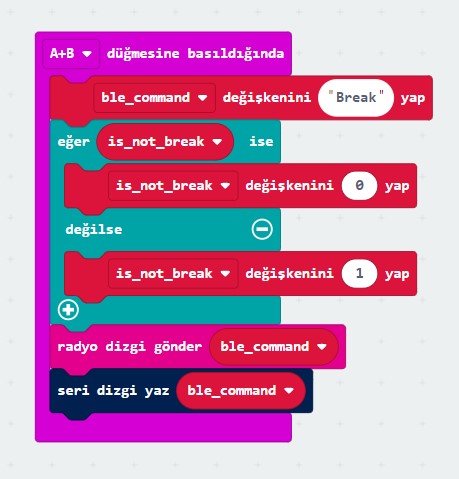
Son olarak ana algoritmamıza bakalım. Burada is_not_break çıktısı için bir fonksiyonumuz var. Bu fonksiyon kumanda eldivenin aktif olmasını sağlar/kontrol eder. Eğer eldivenin üzerindeki iki butona aynı anda basarsak bu değer 0 olur ve ana algoritmamız çalışmaz. Ta ki biz tekrar butonları basıp bu değeri 1 yapana kadar.
Ana algoritmamıza dönecek olursak şimdiye kadar konuştuğumuz fonksiyonları art arda çalıştırarak Bluetooth ile göndermek üzere bir string verisi oluşturur ve gönderir.
SON SÖZ
Bence çok zevkli bir projenin anlatımının sonuna geldik. Yaparken öğrendiğimiz ve geliştirmeye fazlasıyla açık bir proje oldu. Blok kod yazmak kolay gibi gelse de eğer metin kodda da belli bir seviyeye gelince o da blok kod yazmak gibi 😊 Fonksiyon mantığını anlamak için on numara bir uygulama bence. Aynı Labirent Oyun Konsolu projesinde olduğu gibi pek çok özellik de geliştirilebilir (örneğin araba durduğunda üzerindeki ışıkları yaksak nasıl olur 😉). Siz de Elle Kumanda Edilen Micro:bit Arabanızı yaparken takıldığınız noktalar olursa yine aşağıya yorum yapabilirsiniz. İyi üretmeler!
Kaynakça:
Projenin sahibi: https://www.instructables.com/member/nachiketkelkar/
Proje: https://www.instructables.com/Remote-Car-Glove-Controller/

 Yaptık!")

Teşekkürler!Yapılışını çok güzel anlatmışsın Türk kaynak bulmak için çok uğraştım bu konuda bana bir tek sen yardımcı olabildin.
Güzel yorumun için teşekkürler Doğu! İyi eğlenceler 🙂
[…] bir Microbit projesiyle sizlerleyim. Micro:bit ile yaptığımız bir önceki proje “Elle Kumanda Edilen Micro:bit Araba Yapalım” yazısına tıklayarak ulaşabilirsiniz. Peki bu sefer Micro:bit ile Sulama Otomasyonu yapmaya […]
Hocam merhaba, yaptığınız uygulama devresinin de görüntüsünü atsanız çok memnun kalırım. Ben eldiven kullanmadan microbitlerle yapmaya çalışıyorum.